Open-Sourcing Hardware Designs for Improved Robotic Dexterity and Robustness
- Enhanced Design and Performance: ALOHA 2 introduces significant improvements in robotic components such as grippers and gravity compensation, optimizing for both performance and ergonomic teleoperation.
- Comprehensive Simulation Support: The introduction of a detailed MuJoCo simulation model facilitates better policy learning and evaluation, boosting the development of advanced robotic manipulation tasks.
- Open Source for Community Collaboration: By open-sourcing ALOHA 2’s hardware designs and tutorials, the project aims to foster a collaborative environment for research and development in robotic learning.

ALOHA 2, the latest iteration from the ALOHA project, marks a pivotal advancement in the field of bimanual teleoperation systems. Designed to address the limitations of its predecessor, ALOHA 2 integrates enhanced hardware and software features to offer greater performance, user-friendliness, and robustness, thus broadening the scope of possible robotic manipulation tasks.
Technical Enhancements and Innovations
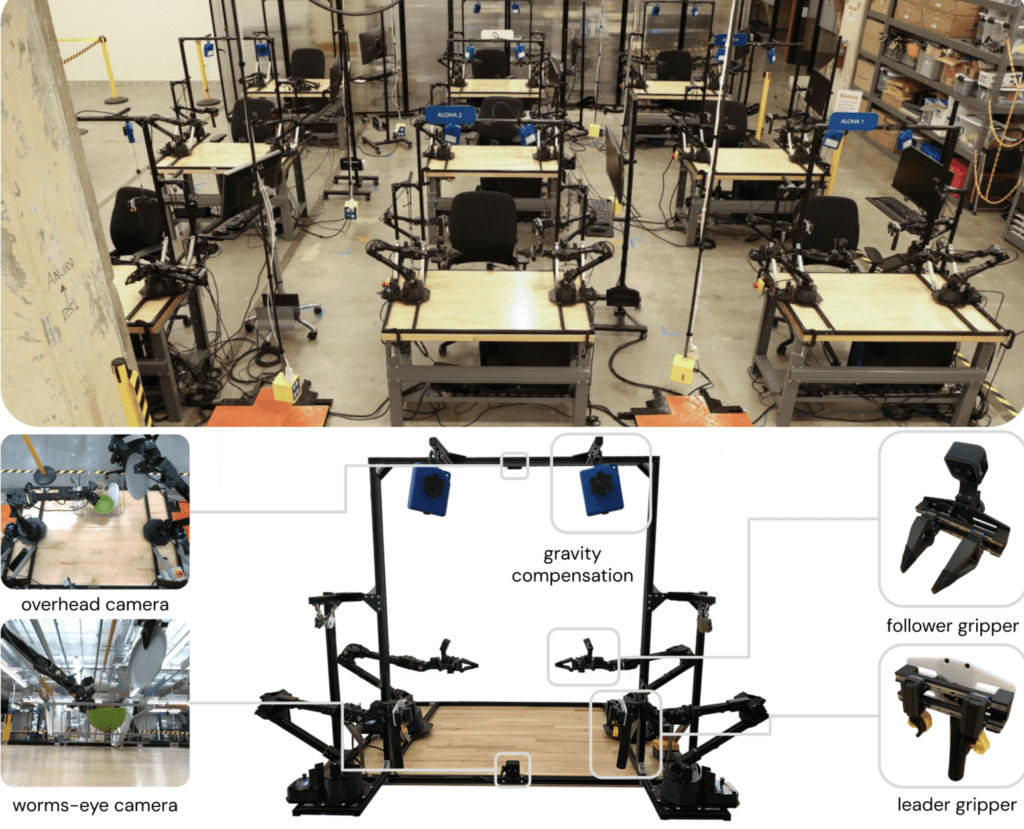
Key improvements in ALOHA 2 include the redesign of critical components such as the grippers, which now feature a new low-friction rail design for improved teleoperation ergonomics and reduced latency. A passive gravity compensation mechanism has been implemented using off-the-shelf components, which surpasses the original rubber band system in durability and efficiency. Furthermore, the structural design has been streamlined to facilitate easier interaction between robots and human collaborators within the workspace.
Simulation and Evaluation Tools
ALOHA 2’s capabilities are further extended through the integration of a precise MuJoCo simulation model. This model not only mirrors the exact specifications of the ALOHA 2 robot but also enhances the ability to collect data, learn policies, and conduct evaluations in a simulated environment. Such tools are crucial for tackling more complex manipulation tasks and ensuring that the robots perform optimally in real-world scenarios.
Open Source Commitment
In a significant move to accelerate research and innovation in robotic manipulation, the hardware designs, tutorials, and simulation models of ALOHA 2 have been made open source. This decision encourages the global research community to contribute to, experiment with, and refine the technology. The open-source framework is expected to lower entry barriers for researchers and developers interested in exploring advanced robotic systems.
Expanding Application Domains
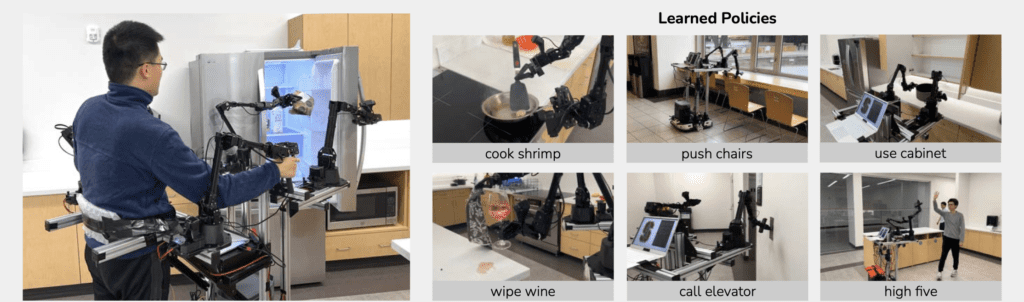
ALOHA 2 is not just a tool for research; it’s also a platform designed to expand into practical applications, from advanced manufacturing to interactive tasks requiring nuanced human-robot collaboration. The system’s enhanced bimanual capabilities are particularly suited for complex tasks such as cooking and healthcare assistance, which require a high degree of dexterity and precision.
Future Directions and Challenges
Despite its advancements, ALOHA 2 still faces challenges, particularly in extending its capabilities to full-body teleoperation and incorporating more sophisticated 3D modeling to avoid artifacts. The team behind ALOHA 2 is committed to continuous improvement, focusing on integrating more diverse talking styles and emotional expressions to improve the robot’s interactivity and usefulness.

ALOHA 2 represents a significant step forward in the evolution of teleoperated robotic systems, offering enhanced tools for research and potential real-world applications in robotics. By providing open access to its designs and fostering a community-driven approach to development, ALOHA 2 aims to shape the future of robotic dexterity and interaction.