Quadrupedal Robotics from Google with Terrain-Adaptive Jumping on Stairs and Stepping Stones
- Transforming Quadrupedal Mobility: Researchers have developed a framework that enables quadrupedal robots to execute agile, continuous jumps across challenging terrains like stairs and stepping stones.
- Overcoming Real-World Challenges: The new method combines advanced perception, motion planning, and control to bridge the gap between simulation and real-world performance.
- Impressive Results: The Unitree Go1 robot showcases remarkable agility, completing complex jumps with unprecedented speed and accuracy, paving the way for future advancements in robotic locomotion.

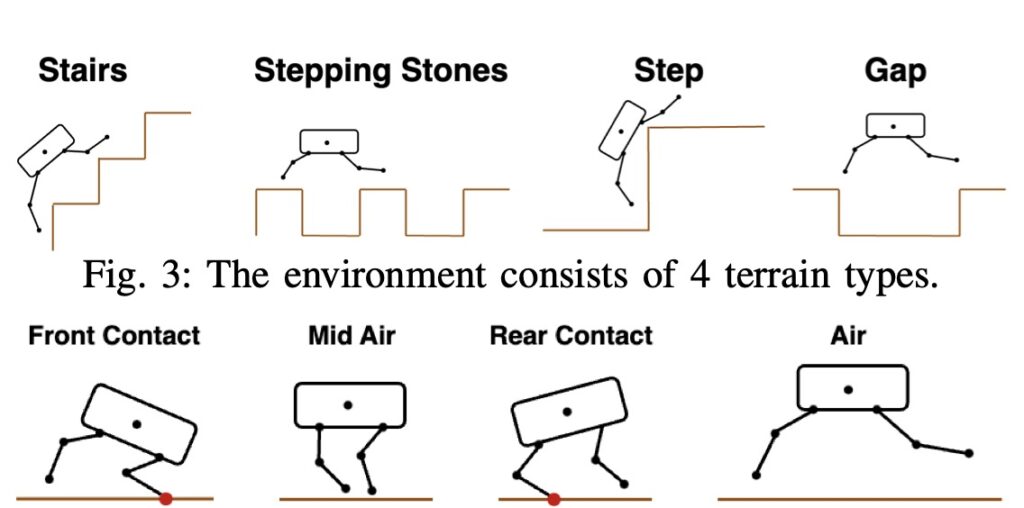
In a groundbreaking advancement for quadrupedal robotics, researchers have introduced a hierarchical framework that allows robots to perform agile and continuous jumping on discontinuous terrains such as stairs and stepping stones. This achievement marks a significant step toward achieving animal-like agility in robots, addressing a long-standing goal in the field of legged locomotion. The new framework promises not only to enhance the mobility of robots but also to improve their adaptability to complex environments.
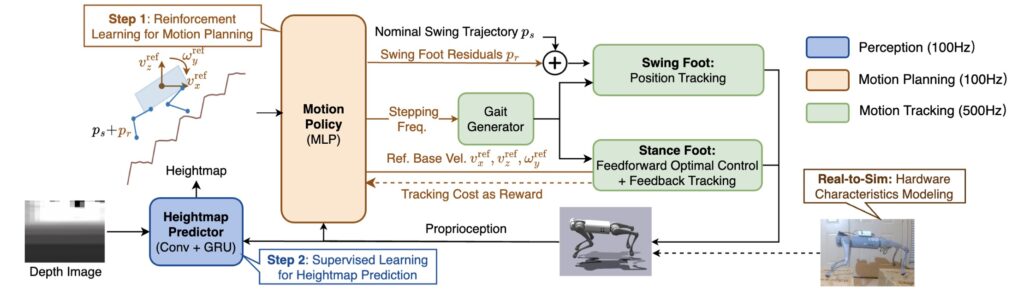
The journey toward effective continuous jumping in robots has not been without its challenges. Unlike single-step jumps, continuous jumping requires precise execution of dynamic motions over longer distances, making it difficult for existing models to maintain stability and accuracy. The newly developed framework integrates a learned heightmap predictor for robust terrain perception, a reinforcement-learning-based motion policy for adaptable planning, and a low-level model-based leg controller for precise tracking. Together, these components enable the robot to seamlessly navigate varying terrains, significantly improving its jumping capabilities.
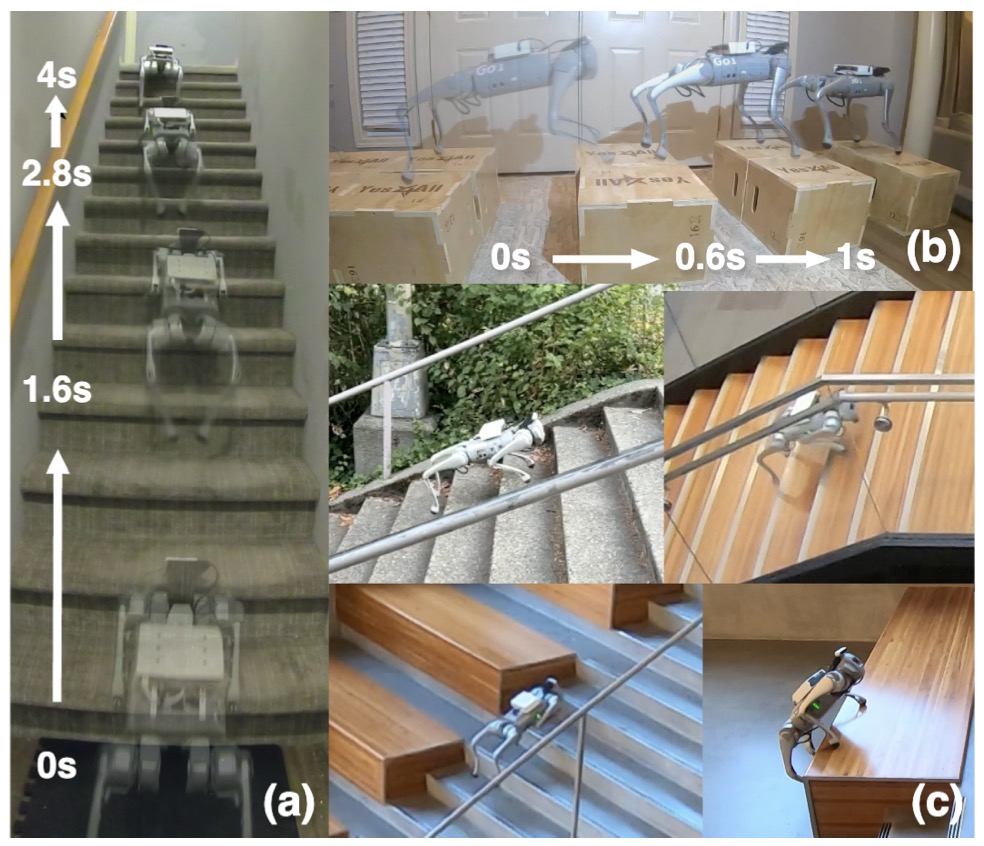
One of the critical challenges faced in transferring these abilities from simulation to the real world has been the sim-to-real gap. The researchers overcame this obstacle by accurately modeling hardware characteristics and enhancing the simulation fidelity. Their experiments demonstrated that the Unitree Go1 robot could cross two stair steps in a single jump and complete a 14-step staircase in just 4.5 seconds. This impressive performance illustrates not only the efficacy of the new framework but also the potential for quadrupedal robots to execute complex parkour tasks with ease.

Despite these advancements, the framework does have its limitations. Currently, the robot’s movements are constrained to the sagittal plane, restricting its ability to execute sideways or turning motions. Additionally, the framework operates on fixed directional commands without strategic path planning to reach specific destinations. Future work aims to address these limitations, expanding the training pipeline to facilitate versatile, goal-oriented agile locomotion in more complex terrains.
The introduction of this hierarchical framework for agile continuous jumping represents a significant leap forward in the capabilities of quadrupedal robots. By successfully enabling the Unitree Go1 to perform complex jumps on discontinuous terrains, this research not only advances the field of robotics but also opens up new possibilities for practical applications in various environments. As researchers continue to refine these technologies, the dream of creating robots that can navigate real-world challenges with the agility of their animal counterparts is closer than ever.